

 Leichte Sprache
Leichte SpracheEsIMiP: Effiziente und sichere Interaktion von Menschen und intelligenten Produktionsanlagen
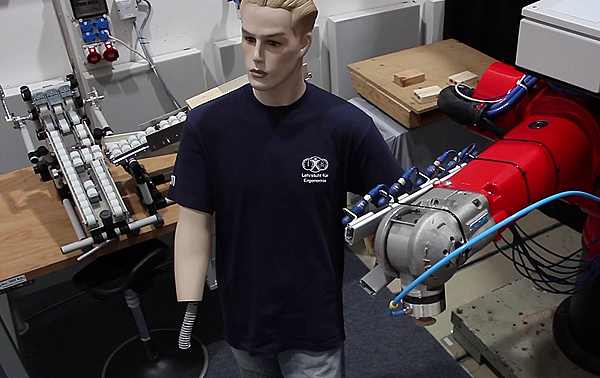
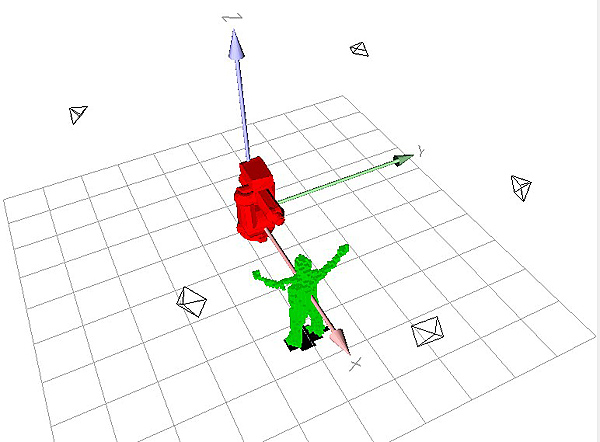
links: Arbeitszelle mit Demonstratoraufbau (Quelle: Technische Universität München, Lehrstuhl für Automatisierung und Informationssysteme (AIS)) rechts: Volumenrekonstruktion in der Arbeitszelle mit Reis RV20-16 (Quelle: Technische Universität München, Lehrstuhl für Automatisierung und Informationssysteme (AIS))
Der Einbezug des Menschen in industrielle Arbeitsabläufe durch Mensch-Roboter-Koexistenz führt zu hohen Anforderungen hinsichtlich der vorzusehenden Sicherheitsmaßnahmen. Ziel des Projekts war es, Kollaborationsformen zu ermöglichen, in denen beide Interaktionspartner in räumlich wie zeitlich naher Distanz effizient zusammen arbeiten. Da das Verhalten des Menschen nicht exakt vorausgesagt werden kann, war eine Steuerungslösung erforderlich, die sich den Gegebenheiten dynamisch anpasst und außerdem in der Lage ist, sich unter Gewährleistung der Sicherheitsanforderungen auf ändernde Umgebungsparameter einzustellen.
Im Projekt wurde ein neuartiger Ansatz vorangetrieben, bei dem a) die Systemkomponente OSC (Optimizing Strategic Control) die Zuverlässigkeit und Verfügbarkeit des Systems durch Erlernen von Kontrollstrategien unter Einbezug des Verhaltens der FSC (Fail-Safe Control) erhöht und b) die unabhängige Systemkomponente FSC die Sicherheit des Gesamtsystems gewährleistet. Die Umgebung des Roboters wird durch ein entwickeltes Sensorsystem kontinuierlich überwacht, um eine Vorhersage über das Verhalten des Benutzers in der Produktionsumgebung und damit ein effizientes Produktionsverhalten des Roboters zu ermöglichen, das zugleich die Sicherheit des Gesamtsystems nicht beeinträchtigt. Eine sichere Detektion von dynamischen Objekten im Arbeitsraum wie auch die sichere Verarbeitung und Ansteuerung des Roboters wurde für die erforderlichen Sicherheitsfunktionen entworfen und umgesetzt.
Systemergonomische Anforderungen wurden mit Hilfe von Untersuchungen gewonnen und spezifiziert, womit die Wahrscheinlichkeit von Fehlhandlungen des Menschen durch die Implementierung der Erkenntnisse in die Steuerungsarchitektur und in die Gestaltung des Arbeitsplatzes reduziert werden konnte. Die entworfene Systemarchitektur ermöglicht eine sicherheitsgerichtete Adaption in technischen Systemen und mit den implementierten Systemkomponenten eine zuverlässige, sichere Mensch-Roboter-Kooperation.
